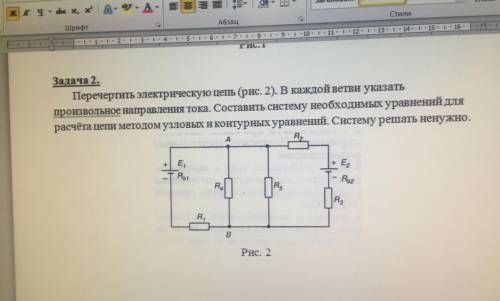
Перечертить электрическую цепь (рис. 2). В каждой ветви указать произвольное направления тока. Составить систему необходимых уравнений для расчёта цепи методом узловых и контурных уравнений. Систему решать ненужно.
В астрономии ; существуют две системы экваториальных координат: первая задаётся склонением δ — дугойкруга склонений от экватора до светила (иногда дугой круга склонений р от полюса до светила , р + δ = 90 ? ) и часовым углом t ; во второй системе t заменяется прямым восхождением α .
Минимальная кинетическая энергия будет в верхней точке траектории (в вершине параболы), в этой точке вертикальная составляющая скорости (проекция скорости на вертикальную ось) равна нулю, и, как известно горизонтальная составляющая скорости - постоянна. максимальная кинетическая энергия будет или в начальный момент, или в момент падения. Будем считать, что тело брошено с поверхности земли. Имеем. E_k_min = (m/2)*(v_x)^2; E_k_max = (m/2)*(v0)^2; (v0)^2 = (v0_y)^2 + (v_x)^2; по условию E_k_max = 2*E_k_min; (m/2)*( (v0_y)^2 + (v_x)^2 ) = 2*(m/2)*(v_x)^2; (v0_y)^2 + (v_x)^2 = 2*(v_x)^2; (v0_y)^2 = (v_x)^2; v0_y = v_x; итак: v0_y = v_x; tg(a) = v0_y/v_x = 1; a = arctg(1) = 45 градусов.
максимальная кинетическая энергия будет или в начальный момент, или в момент падения. Будем считать, что тело брошено с поверхности земли. Имеем.
E_k_min = (m/2)*(v_x)^2;
E_k_max = (m/2)*(v0)^2;
(v0)^2 = (v0_y)^2 + (v_x)^2;
по условию E_k_max = 2*E_k_min;
(m/2)*( (v0_y)^2 + (v_x)^2 ) = 2*(m/2)*(v_x)^2;
(v0_y)^2 + (v_x)^2 = 2*(v_x)^2;
(v0_y)^2 = (v_x)^2;
v0_y = v_x;
итак: v0_y = v_x;
tg(a) = v0_y/v_x = 1;
a = arctg(1) = 45 градусов.