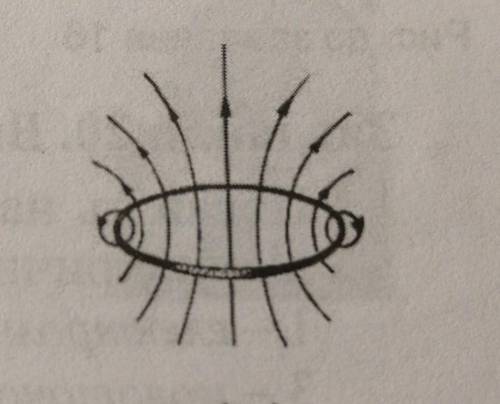
Завдання 12. На рисунку зображений коловий ви- ток зі струмом. Укажіть стрілкою напрям колового струму у витку, лінії індукції магнітного поля якого зображені на рисунку. Підпишіть полярність магнітних полюсів. ФОТО ВВЕРХУ
Статистическая погрешность связана с разбросом значений, которые выдает эксперимент после каждой попытки измерить величину.
Систематическая погрешность характеризует несовершенство самого измерительного инструмента или методики обработки данных, а точнее, недостаточное знание того, насколько «сбоит» инструмент или методика.
Теоретическая/модельная погрешность — это неопределенность результата измерения, которая возникла потому, что методика обработки данных была сложная и в чем-то опиралась на теоретические предположения или результаты моделирования, которые тоже несовершенны. Впрочем, иногда эту погрешность считают просто разновидностью систематических погрешностей.
Момент, который вращает рычаг против часовой стрелки:
M₁ = F₁L₁ = 2 · 3 = 6 (H)
Момент, который вращает рычаг по часовой стрелке:
M₂ = F₂L₂ = 3 · 2 = 6 (H)
Так как оба момента вращения равны по величине и противоположны по направлению, то рычаг будет находиться в равновесии.
Рис.2
Обе силы приложены к правому плечу рычага, но противоположны по направлению:
F₁ = 3 H; L₁ = 1,5 деления
F₂ = ? H; L₂ = 2,6 деления
Момент, который вращает рычаг против часовой стрелки:
M₁ = F₁L₁
Момент, который вращает рычаг по часовой стрелке:
M₂ = F₂L₂
Для получения положения равновесия рычага необходимо:
M₁ = M₂ => F₁L₁ = F₂L₂
Тогда:
F₂ = F₁L₁/L₂ = 3 · 1,5 : 2,6 ≈ 1,73 (H)
Судя по рисунку, динамометр показывает значение силы F₂ = 1 H.
Следовательно, в том случае, если динамометр жестко закреплен на подвесе, рычаг будет двигаться по часовой стрелке до тех пор, пока значение силы F₂ не достигнет значения ≈ 1,73 Н
Вывод: рычаг будет находиться в равновесии, если моменты вращения рычага по часовой стрелке и против нее будут равны по величине:
M₁ = M₂
Так как момент вражения рычага численно равен произведению силы, действующей на его плечо, и длины этого плеча, то условие равновесия рычага:
F₁L₁ = F₂L₂
На точность измерения результатов влияют:
погрешность измерения динамометра: ΔF = ± 0,1 H
погрешность измерения длины плеч рычага: ΔL = ± 0,5 дел.
Статистическая погрешность связана с разбросом значений, которые выдает эксперимент после каждой попытки измерить величину.
Систематическая погрешность характеризует несовершенство самого измерительного инструмента или методики обработки данных, а точнее, недостаточное знание того, насколько «сбоит» инструмент или методика.
Теоретическая/модельная погрешность — это неопределенность результата измерения, которая возникла потому, что методика обработки данных была сложная и в чем-то опиралась на теоретические предположения или результаты моделирования, которые тоже несовершенны. Впрочем, иногда эту погрешность считают просто разновидностью систематических погрешностей.
Предполагаем, что вес одного груза равен 1 Н.
Рис.1
На левом плече рычага: F₁ = 2 H; L₁ = 3 делениям
На правом плече рычага: F₂ = 3 H; L₂ = 2 делениям
Момент, который вращает рычаг против часовой стрелки:
M₁ = F₁L₁ = 2 · 3 = 6 (H)
Момент, который вращает рычаг по часовой стрелке:
M₂ = F₂L₂ = 3 · 2 = 6 (H)
Так как оба момента вращения равны по величине и противоположны по направлению, то рычаг будет находиться в равновесии.
Рис.2
Обе силы приложены к правому плечу рычага, но противоположны по направлению:
F₁ = 3 H; L₁ = 1,5 деления
F₂ = ? H; L₂ = 2,6 деления
Момент, который вращает рычаг против часовой стрелки:
M₁ = F₁L₁
Момент, который вращает рычаг по часовой стрелке:
M₂ = F₂L₂
Для получения положения равновесия рычага необходимо:
M₁ = M₂ => F₁L₁ = F₂L₂
Тогда:
F₂ = F₁L₁/L₂ = 3 · 1,5 : 2,6 ≈ 1,73 (H)
Судя по рисунку, динамометр показывает значение силы F₂ = 1 H.
Следовательно, в том случае, если динамометр жестко закреплен на подвесе, рычаг будет двигаться по часовой стрелке до тех пор, пока значение силы F₂ не достигнет значения ≈ 1,73 Н
Вывод: рычаг будет находиться в равновесии, если моменты вращения рычага по часовой стрелке и против нее будут равны по величине:
M₁ = M₂
Так как момент вражения рычага численно равен произведению силы, действующей на его плечо, и длины этого плеча, то условие равновесия рычага:
F₁L₁ = F₂L₂
На точность измерения результатов влияют:
погрешность измерения динамометра: ΔF = ± 0,1 H
погрешность измерения длины плеч рычага: ΔL = ± 0,5 дел.