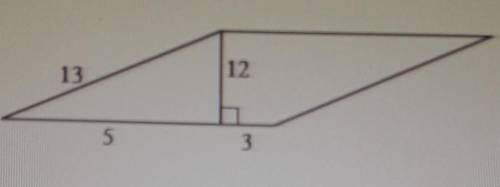
α-тупой угол, диагональ АС разбивает параллелограмм на два равных треугольника, в треугольнике АВС есть три угла α;β; (180-(α+β)); sin(180-(α+β))=sin(α+β)=sinα*cosβ+sinβ*cosα
Векторний тип даних описується як ім'я базового типу плюс кількість вимірів, наприклад float4. Даний запис означає, що буде виділена пам'ять під чотири змінні типу float, котрі у оперативній пам'яті будуть розташовані підряд. Над векторними типами можна проводити базові математичні операції типу +,-,*,/ також можна проводити операцію присвоєння. Доступ до певного компоненту типу векторна змінна можна отримати через символ «.» після чого вказується ім'я компоненту.
Використання
OpenCL
У OpenCL векторні типи даних можуть будуватися на основі наступних базових типів даних: [u]char, [u]short, [u]int, [u]long, float, double, half [1]. Стандарт визначає наступну кількість вимірів для векторного типу: 2, 4, 8 та 16. У таблиці нижче наведені імена компонентів з вказаними порядком [2].
Імена v.x, v.y, v.z, v.w, можуть використовуватися лише у векторах розмірністю 2 та 4.
CUDA
У CUDA векторні типи даних розмірності 2, 3 та 4 можуть будуватися на основі наступних базових типів даних: [u]char, [u]short, [u]int, [u]long, float, а також розмірністю 2 на основі типів: [u]longlong, double[3].
Посилання
OpenCL Vector Data Types. OpenCL documentation. Khronos Group.
α-тупой угол, диагональ АС разбивает параллелограмм на два равных треугольника, в треугольнике АВС есть три угла α;β; (180-(α+β)); sin(180-(α+β))=sin(α+β)=sinα*cosβ+sinβ*cosα
cosβ=√(1-sin²β)=√(1-64/289)=√(225/289)=15/17;
cosα=-√(1-sin²α)=-√(1-144/169)=-√(25/169)=-5/13;
sin(α+β)=(12/13)*(5/17)-(8/17)*(5/13)=(60-40)/(17*13)=20/(17*13);
По следствию из теоремы синусов АС/sin(180-(α+β))=BC/sinα=AB/sinβ;
5/(20/17*13)= BC/sinα; BC=5*17*13*12/(13*20)=51
5/(20/17*13)=AB/sinβ; АВ=5*17*13*8/(17*20)=26
Значит, площадь равна АВ*АС*sin(α+β)=51*26*(20/17*13)=120
ответ 120,00
Посмотрел на задание, которое Вам предложили в качестве решения в комментариях. Проверил. ответ тот же. )
Объяснение:
Відповідь:
Векторний тип даних описується як ім'я базового типу плюс кількість вимірів, наприклад float4. Даний запис означає, що буде виділена пам'ять під чотири змінні типу float, котрі у оперативній пам'яті будуть розташовані підряд. Над векторними типами можна проводити базові математичні операції типу +,-,*,/ також можна проводити операцію присвоєння. Доступ до певного компоненту типу векторна змінна можна отримати через символ «.» після чого вказується ім'я компоненту.
Використання
OpenCL
У OpenCL векторні типи даних можуть будуватися на основі наступних базових типів даних: [u]char, [u]short, [u]int, [u]long, float, double, half [1]. Стандарт визначає наступну кількість вимірів для векторного типу: 2, 4, 8 та 16. У таблиці нижче наведені імена компонентів з вказаними порядком [2].
Ім'я\N 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
floatN v v.x, v.s0 v.y, v.s1 v.z, v.s2 v.w, v.s3 v.s4 v.s5 v.s6 v.s7 v.s8 v.s9 v.sa, v.sA v.sb, v.sB v.sc, v.sC v.sd, v.sD v.se, v.sE v.sf, v.sF
Імена v.x, v.y, v.z, v.w, можуть використовуватися лише у векторах розмірністю 2 та 4.
CUDA
У CUDA векторні типи даних розмірності 2, 3 та 4 можуть будуватися на основі наступних базових типів даних: [u]char, [u]short, [u]int, [u]long, float, а також розмірністю 2 на основі типів: [u]longlong, double[3].
Посилання
OpenCL Vector Data Types. OpenCL documentation. Khronos Group.
OpenCL Vector Dimension. OpenCL quick reference card. Khronos Group.
CUDA Vector Data Types.
Див. також
Добуток Адамара
Структура даних
Пояснення: