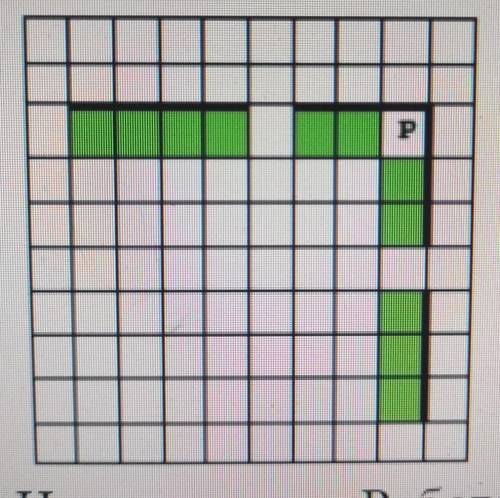
.1 (№ 1486) На бесконечном поле есть горизонтальная и вертикальная стены. Правый конец горизонтальной стены соединён с верхним концом вертикальной стены. Длины стен неизвестны. В каждой стене есть ровно один проход, точное место прохода и его ширина неизвестны. Робот находится в клетке, расположенной непосредственно в углу под горизонтальной стеной и слева от вертикальной стены. НАПИШИТЕ ДЛЯ РОБОТА АЛГОРИТМ
Хорошо, давайте составим алгоритм для решения этой задачи. Перед тем, как начать, давайте разберемся с текущей ситуацией и постараемся сформулировать пошаговое решение для робота.
Визуализируя ситуацию на бесконечном поле, мы видим, что робот находится в углу под горизонтальной стеной, слева от вертикальной стены. Он хочет пройти через проход в стенах, чтобы продолжить свое движение.
Алгоритм для робота:
1. Повернуться направо, так чтобы робот перестал быть под горизонтальной стеной.
Объяснение: Робот находится в углу под горизонтальной стеной слева от вертикальной, поэтому ему нужно сдвинуться вправо, чтобы оказаться рядом с проходом в стенах.
Шаги:
a. Робот поворачивает налево.
b. Робот двигается вперед, до тех пор, пока он не перестанет быть под горизонтальной стеной.
2. Повернуться влево, чтобы робот стал направлен в сторону прохода.
Объяснение: Робот сейчас рядом с проходом, но направлен в неправильном направлении, поэтому он должен развернуться, чтобы его направление совпадало с направлением прохода.
Шаги:
a. Робот поворачивает налево.
3. Двигаться вперед, пока робот не достигнет правого конца вертикальной стены.
Объяснение: Робот повернут в сторону прохода и должен продвигаться в этом направлении, чтобы достичь правого конца вертикальной стены, где находится проход.
Шаги:
a. Робот двигается вперед, пока не достигнет правого конца вертикальной стены.
4. Пройти через проход в стенах.
Объяснение: После достижения правого конца вертикальной стены, робот должен пройти через проход, чтобы продолжить свое движение по бесконечному полю.
Шаги:
a. Робот продолжает двигаться вперед, через проход, пока не достигнет своей целевой точки на поле.
Это пошаговое решение поможет роботу преодолеть стены и пройти через проход, чтобы продолжить его движение. Обратите внимание, что точные размеры и местоположение прохода в стенах неизвестны, поэтому робот будет следовать алгоритму, основываясь на ситуации на месте.
Визуализируя ситуацию на бесконечном поле, мы видим, что робот находится в углу под горизонтальной стеной, слева от вертикальной стены. Он хочет пройти через проход в стенах, чтобы продолжить свое движение.
Алгоритм для робота:
1. Повернуться направо, так чтобы робот перестал быть под горизонтальной стеной.
Объяснение: Робот находится в углу под горизонтальной стеной слева от вертикальной, поэтому ему нужно сдвинуться вправо, чтобы оказаться рядом с проходом в стенах.
Шаги:
a. Робот поворачивает налево.
b. Робот двигается вперед, до тех пор, пока он не перестанет быть под горизонтальной стеной.
2. Повернуться влево, чтобы робот стал направлен в сторону прохода.
Объяснение: Робот сейчас рядом с проходом, но направлен в неправильном направлении, поэтому он должен развернуться, чтобы его направление совпадало с направлением прохода.
Шаги:
a. Робот поворачивает налево.
3. Двигаться вперед, пока робот не достигнет правого конца вертикальной стены.
Объяснение: Робот повернут в сторону прохода и должен продвигаться в этом направлении, чтобы достичь правого конца вертикальной стены, где находится проход.
Шаги:
a. Робот двигается вперед, пока не достигнет правого конца вертикальной стены.
4. Пройти через проход в стенах.
Объяснение: После достижения правого конца вертикальной стены, робот должен пройти через проход, чтобы продолжить свое движение по бесконечному полю.
Шаги:
a. Робот продолжает двигаться вперед, через проход, пока не достигнет своей целевой точки на поле.
Это пошаговое решение поможет роботу преодолеть стены и пройти через проход, чтобы продолжить его движение. Обратите внимание, что точные размеры и местоположение прохода в стенах неизвестны, поэтому робот будет следовать алгоритму, основываясь на ситуации на месте.