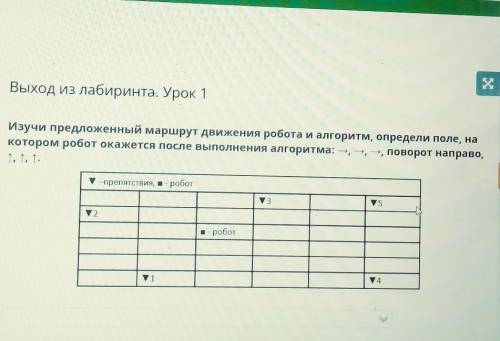
Х Выход из лабиринта. Урок 1 Изучи предложенный маршрут движения робота и алгоритм, определи поле, на котором робот окажется после выполнения алгоритма: -, -, -, поворот направо, 1, 1, Т. — препятствия, - робот T3 T5 Т2 - робот Т1
Предыдущий цикл статей, в котором давались советы относительно того как выходить из лабиринта не закончился самым главным - там было объяснено правило правой руки, давался обзор тактик решения задачи для средней категории World Robot Olympiad 2011, советы по тому, какими датчиками и как пользоваться, но так и не было рассмотрено, как написать самую простую программу. Настало время наверстать этот момент.
Итак, сперва следует напомнить, какие же основные блоки определяют поведение робота в лабиринте:
Движение прямо с опросом датчиков, обнаруживающих проход справа, и датчиков, обнаруживающих столкновение с преградой
Поворот направо, в случае обнаружения прохода
Поворот налево, в случае обнаружения препятствия
В общем случае обычное движение прямо - не самый сложный элемент в программе. Теми нюансами, которые появляются в ходе такого движения, на первых порах можно пренебречь, сфокусировавшись на других основных элементах алгоритма - выполнении поворотов.
Здесь следует ненадолго остановиться и опять вернуться к рассмотрению конструкции робота.
Первый случай - поворот направо. Подразумевается, что он происходит после срабатывания датчика смотрящего в сторону.
Предыдущий цикл статей, в котором давались советы относительно того как выходить из лабиринта не закончился самым главным - там было объяснено правило правой руки, давался обзор тактик решения задачи для средней категории World Robot Olympiad 2011, советы по тому, какими датчиками и как пользоваться, но так и не было рассмотрено, как написать самую простую программу. Настало время наверстать этот момент.
Итак, сперва следует напомнить, какие же основные блоки определяют поведение робота в лабиринте:
Движение прямо с опросом датчиков, обнаруживающих проход справа, и датчиков, обнаруживающих столкновение с преградой
Поворот направо, в случае обнаружения прохода
Поворот налево, в случае обнаружения препятствия
В общем случае обычное движение прямо - не самый сложный элемент в программе. Теми нюансами, которые появляются в ходе такого движения, на первых порах можно пренебречь, сфокусировавшись на других основных элементах алгоритма - выполнении поворотов.
Здесь следует ненадолго остановиться и опять вернуться к рассмотрению конструкции робота.
Первый случай - поворот направо. Подразумевается, что он происходит после срабатывания датчика смотрящего в сторону.
Объяснение:
Если не поняла пиши в мне.
ОК?