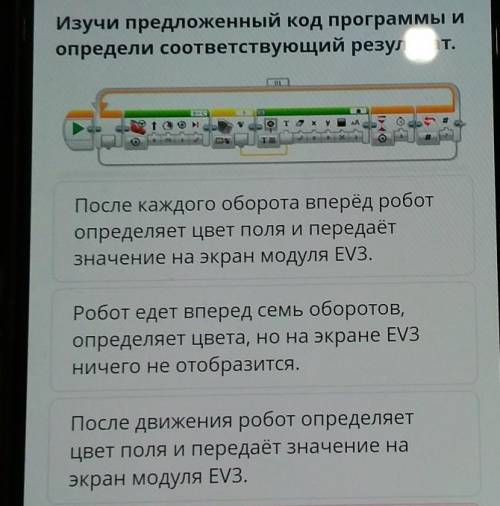
1) после каждого оборота вперёд робот определяет цвет поля и передаёт значение на экран модуля EV3.
Объяснение:
блок датчика цвета расположен внутри цикла, и поэтому робот после каждого перемещения определяет цвет и выводит ответ на экран.
1) после каждого оборота вперёд робот определяет цвет поля и передаёт значение на экран модуля EV3.
Объяснение:
блок датчика цвета расположен внутри цикла, и поэтому робот после каждого перемещения определяет цвет и выводит ответ на экран.