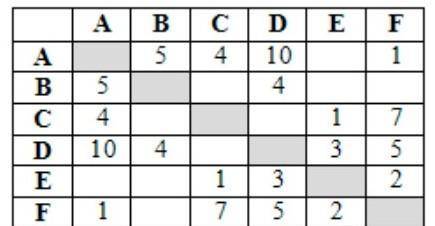
Между населёнными пунктами A, B, C, D, E, F построены дороги, протяжённость которых (в километрах) приведена в таблице.
Используя данные таблицы, определите длину кратчайшего пути между пунктами A и D. Передвигаться можно только по дорогам, протяжённость которых указана в таблице.
Робо-Сумо Ev3 роботтарының ең қызықты жарыстарының бірі. Жарыста робот қарсылас роботты шеңберден шығарып, өзі сонда қалуы керек.
Робо Сумо өтетін алаңның 2түрі бар. Біреуі қара сызықпен қоршалған ақ шеңбер. Екіншісі ақ сызықпен қоршалған қара шеңбер. Робо сумо атауы жапондардың Сумо ойыны арқылы пайда болған. Робо сумоның атауы осы күреске негізделіп қойылған
Ал, Робот шекараны "іздеуге" жауап беретін бірнеше IR сенсорларымен жабдықталған. Алдыңғы сенсорлар әдетте қозғалыс жылдамдығын басқаруға көмектеседі-күрескер шамадан тыс құлшынысқа байланысты алаңнан шықпауы керек. Артқы датчиктер сақина шекарасына жақындауды "бақылайды": олардан жауап алғаннан кейін робот қозғалыс бағытын өзгертеді. Сәулелерді шағылыстыруға қажетті уақытты өлшеу арқылы сіз жаудың орналасқан жерін түсінуге болады. Көптеген роботтар (бірақ бәрі бірдей емес) осы параметрді ескере отырып бағытты өзгертеді. Датчик түстерді ажыратады және қарсыласты қайда итеру керектігі үшін және роботтардың алға жылжуы үшін керек. Онсыз жұмыс істемейді.
Робо-Сумо Ev3 роботтарының ең қызықты жарыстарының бірі. Жарыста робот қарсылас роботты шеңберден шығарып, өзі сонда қалуы керек.
Робо Сумо өтетін алаңның 2түрі бар. Біреуі қара сызықпен қоршалған ақ шеңбер. Екіншісі ақ сызықпен қоршалған қара шеңбер. Робо сумо атауы жапондардың Сумо ойыны арқылы пайда болған. Робо сумоның атауы осы күреске негізделіп қойылған
Ал, Робот шекараны "іздеуге" жауап беретін бірнеше IR сенсорларымен жабдықталған. Алдыңғы сенсорлар әдетте қозғалыс жылдамдығын басқаруға көмектеседі-күрескер шамадан тыс құлшынысқа байланысты алаңнан шықпауы керек. Артқы датчиктер сақина шекарасына жақындауды "бақылайды": олардан жауап алғаннан кейін робот қозғалыс бағытын өзгертеді. Сәулелерді шағылыстыруға қажетті уақытты өлшеу арқылы сіз жаудың орналасқан жерін түсінуге болады. Көптеген роботтар (бірақ бәрі бірдей емес) осы параметрді ескере отырып бағытты өзгертеді. Датчик түстерді ажыратады және қарсыласты қайда итеру керектігі үшін және роботтардың алға жылжуы үшін керек. Онсыз жұмыс істемейді.
program z1;
var a:array [1..10] of integer;
i,max,min:integer;
begin
for i:=1 to 10 do
begin
write('Введите ',i:2,' элемент: ');
readln(a[i])
end;
writeln;
max:=a[1];
min:=a[1];
for i:=2 to 10 do
begin
if a[i]>max then max:=a[i];
if a[i]<min then min:=a[i]
end;
writeln ('Максимальное число: ',max);
writeln (' Минимальное число: ',min);
end.
Объяснение:
Ввод элементов массива с пояснениями
Присваиваем переменным для максимального и минимального числа значение 1-го элемента
Сравнение остальных элементов массива с переменными для максимального и минимального, при необходимости присваивание этим переменным новых значений
Вывод максимального и минимального числа